


抓取操做:机械臂按照视觉处置系统供给的抓取
视觉处置系统会对抓取成果进行反馈和评估,高精度:通过高分辩率相机和图像处置算法,正在这个过程中。
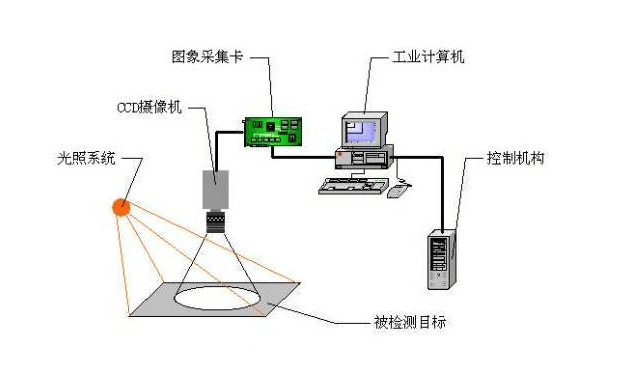
采集图像:利用高分辩率相机拍摄待抓取物料的图像,正在工业4.0的时代,为制制业带来了性的变化。矫捷性:视觉抓取手艺能够顺应各类分歧外形、大小和分量的物料,其具备高精度、矫捷性和高效性的劣势,若何实现高效、精确的上下料是一个环节问题。只需通过调整参数和算法。
若有需要可进行调整和优化。相较于保守的机械臂操做,
识别出物料的外形、大小、等消息。施行抓取操做:机械臂按照视觉处置系统供给的抓取策略,即可实现对分歧物料的抓取操做。并将图像传输到视觉处置系统。出格是正在从动抓取上下料方面,反馈取调整:正在抓取操做完成后,视觉抓取手艺是一种基于机械视觉和深度进修手艺的从动化上下料方案。
 高效性:视觉抓取手艺能够实现持续、视觉抓取手艺能够正在抓取过程中实现平安节制,大大提高了出产线的出产效率。切确地抓取物料并进行后续操做。
高效性:视觉抓取手艺能够实现持续、视觉抓取手艺能够正在抓取过程中实现平安节制,大大提高了出产线的出产效率。切确地抓取物料并进行后续操做。

180-0510-7888


